Martian Boundary Layer Exploration UAV
National Aerospace Conceptual Design Competition VII · Aeronautical Society of India
Project Overview
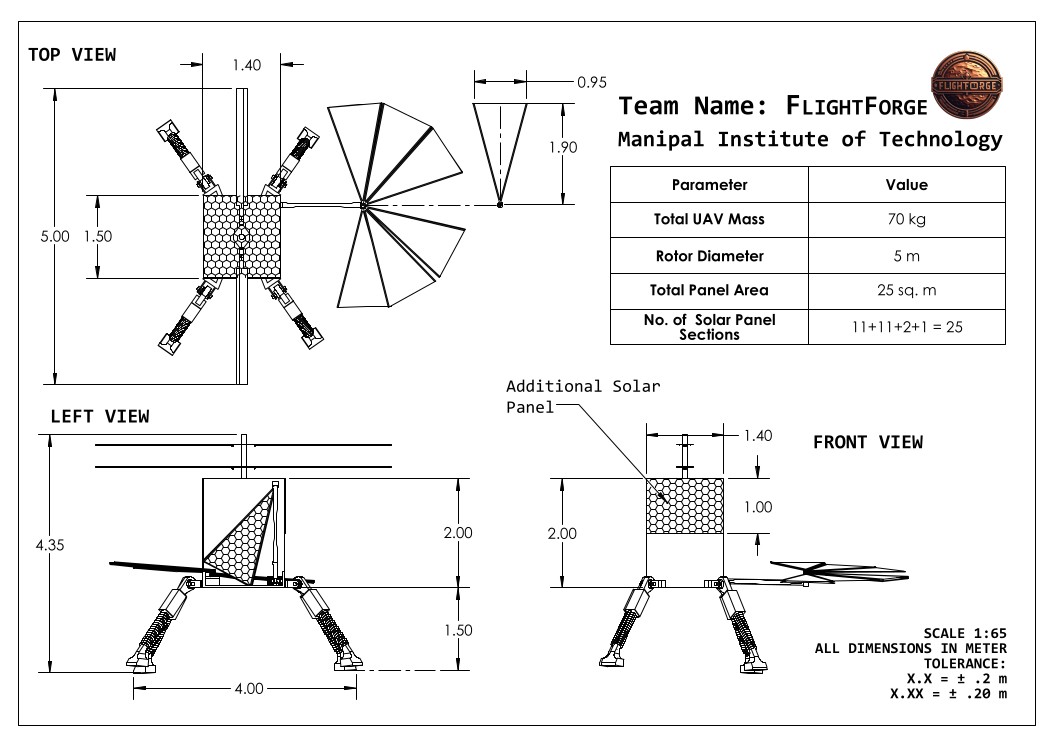
Developed a fully conceptualised UAV capable of studying the planetary boundary layer (PBL) of the Martian atmosphere, operating within the roughness layer up to ~100 m above the surface. The primary design challenge was to maximise sorties per Martian sol while satisfying strict constraints on mass, payload, energy, and aeroshell stowage.
Problem Definition
Design a UAV for repeated vertical flights within the Martian PBL, collecting atmospheric data (temperature distribution, density variation, wind behaviour, dust transport) during each sortie. Must perform multiple sorties per sol under severe constraints: low atmospheric density, limited solar energy, and strict mass limitations.
Design Constraints
Configuration Selection
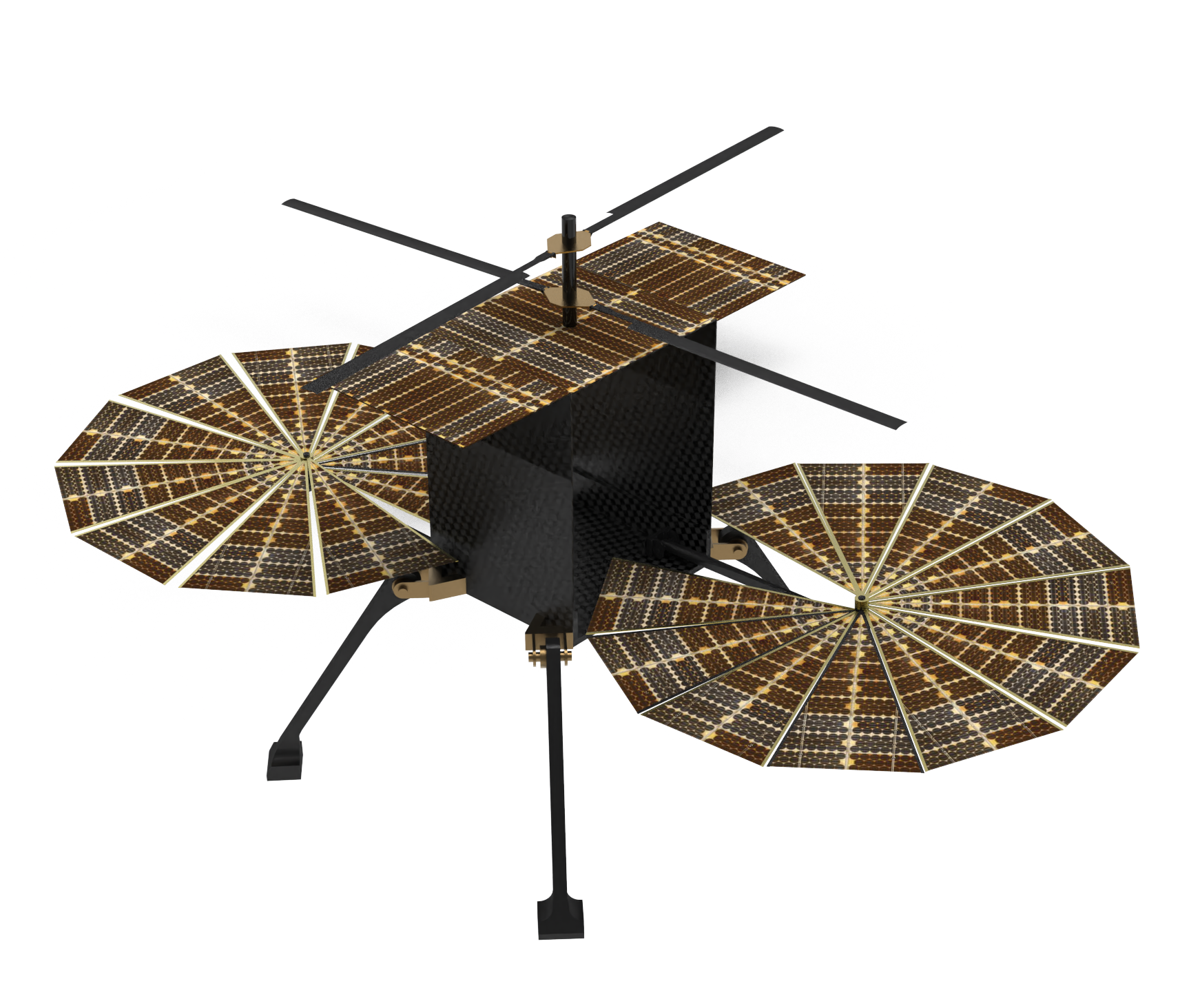
A coaxial rotor configuration was selected: two rotors on a concentric shaft rotating in opposite directions, cancelling torque and eliminating the need for a tail rotor. This provides higher thrust per rotor radius, lower disk loading, improved hover efficiency, compact stowage geometry, and stability in cross-wind conditions, critical for the low-density Martian atmosphere.
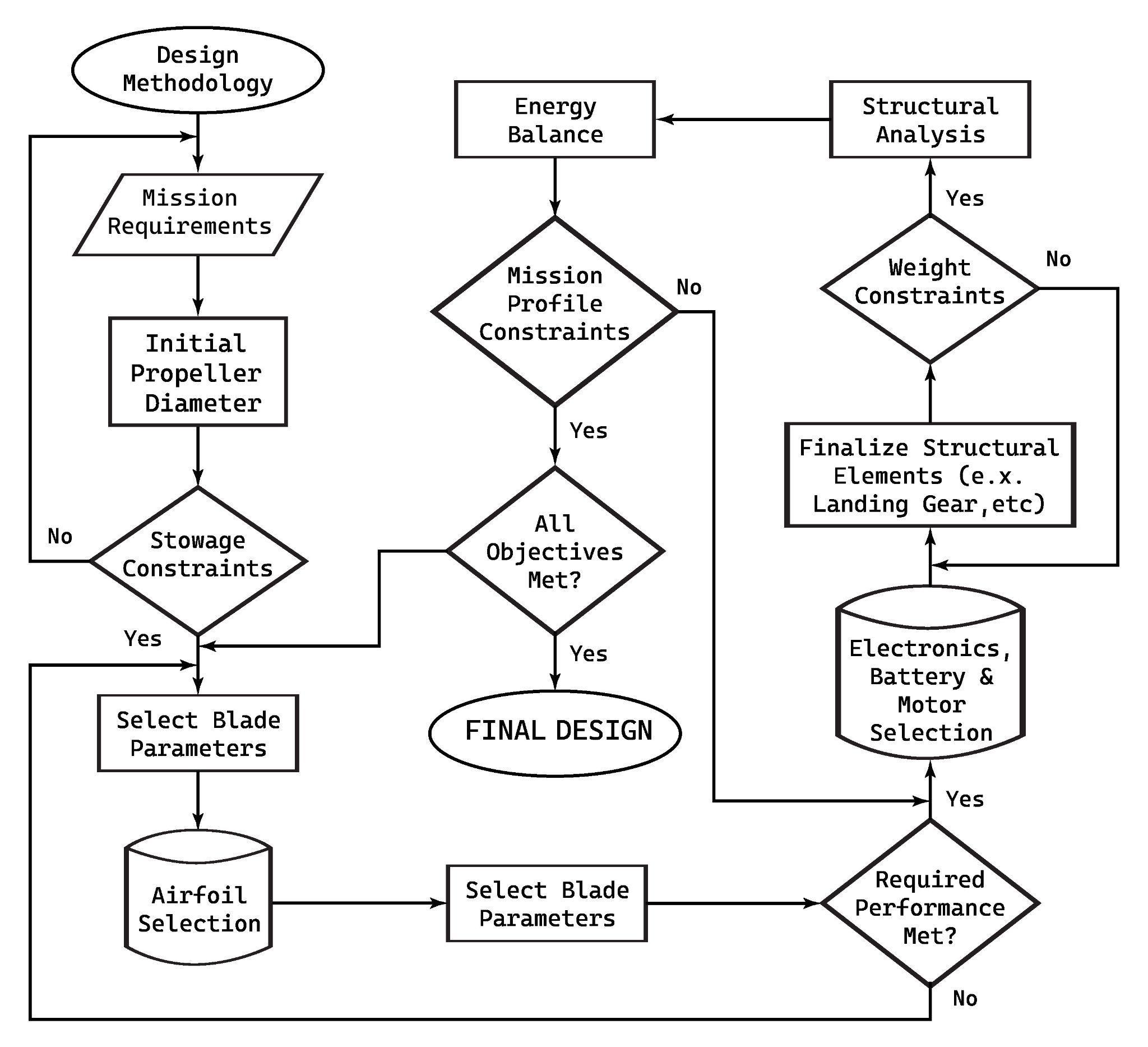
Design Methodology
An iterative multidisciplinary design process integrated aerodynamics, propulsion, structural analysis, and energy modelling: mission requirements → rotor sizing → stowage evaluation → blade/airfoil selection → energy balance → structural sizing → iteration until all constraints satisfied.
Aerodynamic & Propulsion Design
~140 candidate airfoils were evaluated under Martian atmospheric conditions to select the final interpolated configuration.
Energy System & Mission Profile
A solar-assisted energy system maximises sorties per sol. After each flight, the UAV lands and deploys solar panels for recharging. Solar irradiance modelling (MATLAB) incorporated the Martian solar cycle, atmospheric attenuation, latitude dependence, and time-of-day variation to optimise flight timing and recharge cycles.
Structural Architecture
Foldable rotor blades for aeroshell storage, lightweight composite structure, deployable solar panel arrays, and landing gear designed for uneven Martian terrain. The final configuration balanced mass efficiency, structural strength, and operational flexibility.

Competition Outcome
Evaluated on technical analysis, mission architecture feasibility, innovation in UAV configuration, and design documentation.
Team FlightForge
Parth Jain · Kanak Agarwal · Vedant Vijayakrishnan · Pranav Karkera · Aditya Singh
Mentor: Dr. Manikandan Murugaiah

